Pour un robot bolide, détecter un obstacle peut être intéressant (un mur par exemple). Le détecteur utilisé est celui-ci (voir aussi cette page) :
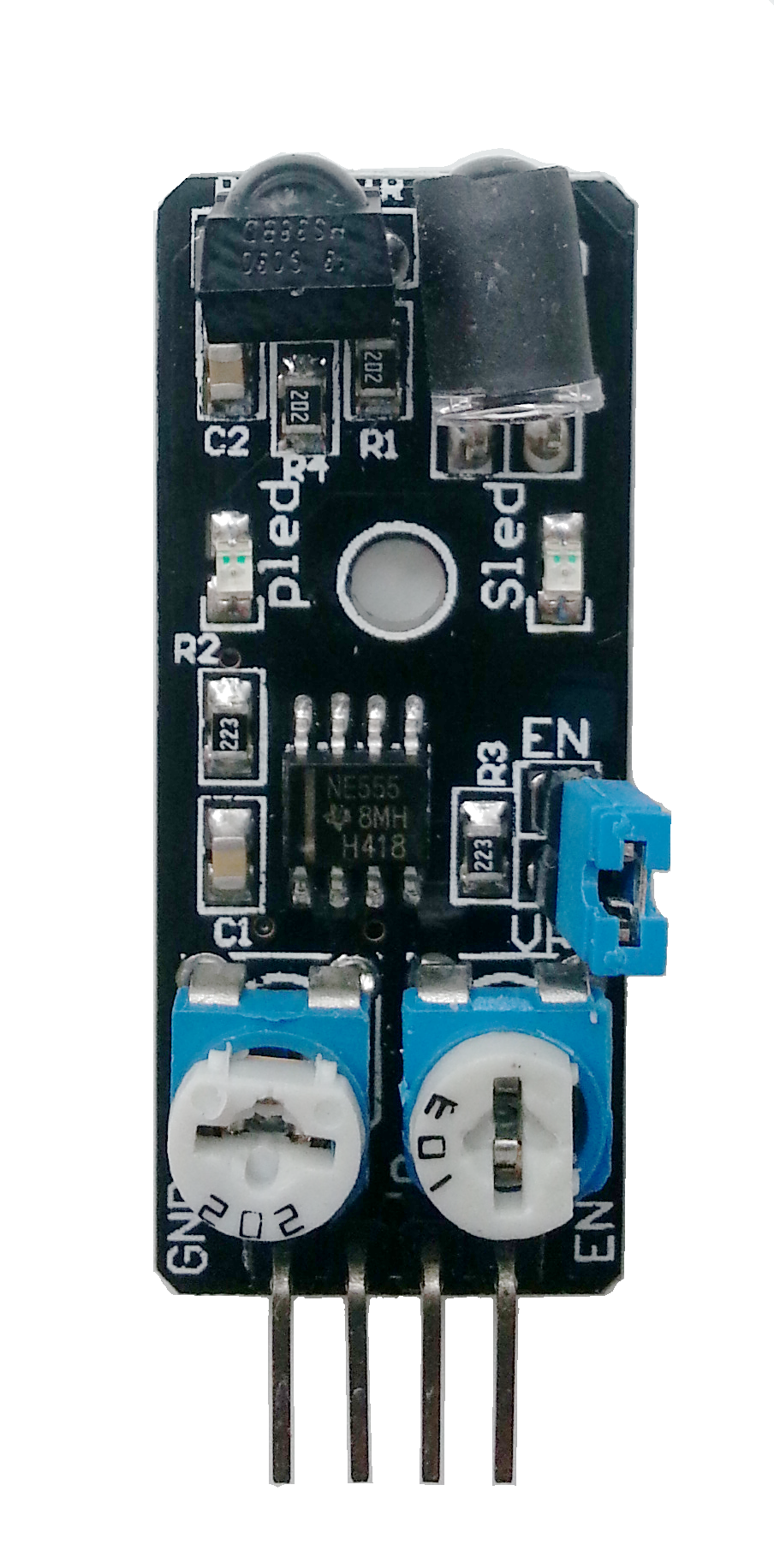
- GND : Mise à la terre
- + : 5V
- OUT : signal de sortie (0 ou 1)
- EN : non utilisé
- On doit ajuster les potentiomètres pour optimiser la lecture
- La distance de détection n’est pas très grande (~ 10 cm)
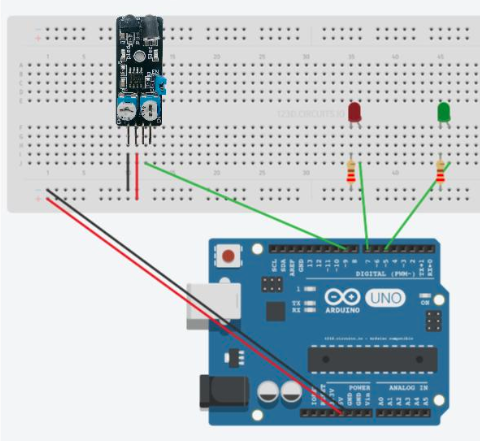
Montage
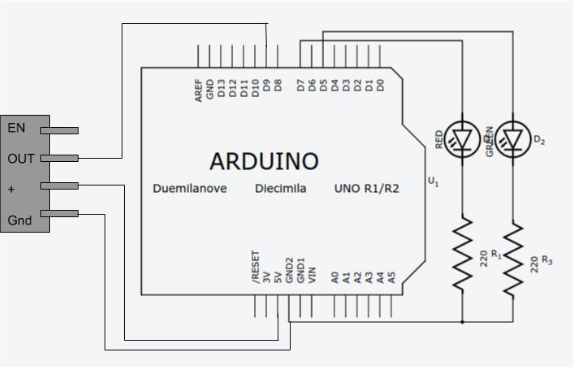
Schéma
Programme
On allume la DEL verte (sortie 5) s’il n’y a pas d’obstacle (entrée 9 à HIGH), on allume la DEL rouge (sortie 7) si obstacle.

void setup()
{
pinMode(9, INPUT);
pinMode(7, OUTPUT);
pinMode(5, OUTPUT);
}
void loop()
{
if (digitalRead(9) == LOW) {
digitalWrite(7, HIGH);
digitalWrite(5, LOW);
} else {
digitalWrite(7, LOW);
digitalWrite(5, HIGH);
}
}
Vidéo présentant le résultat
Bonjour j’ai exactement le même capteur pour un projet de robot automatique et il ne capte pas du tout d’obstacle, sauf si je bouge ma main très très vite. Le signal n’est également pas constant comme sur votre vidéo. Pouvez vous m’aider ? Merci
Bonjour,
avez vous tenté d’ajuster la sensibilité avec le potentiomètre du capteur?
Il est possible que le capteur soit défectueux.
Bonne chance!